巧みなメカニズム
ヒトの巧みさの原因を解明し,ロボットハンドの性能を向上させる研究をおこなっています.巧みさを定量化するために,2個のボール操作の動作分析や,手からボールにかかる力を計測する機器の開発をおこなっています.職業適性検査や,幼児の発達評価にも応用可能です.
日本舞踊における身体技法の抽出
身体技法の仕組みや身体への影響を筋骨格構造から解明しました.また今後,その結果をロボット制御に応用することを目指しています.
【日本語字幕】
【英語字幕】
双腕作業機の操作性評価
双腕作業機の操作系を評価し,操作しやすいコントローラを開発します.日立建機株式会社との共同研究です.

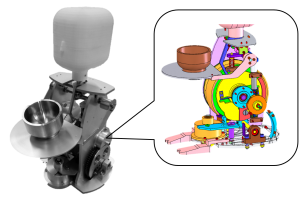
茶運び人形の加工・組立誤差
伝統芸能やからくり機構の巧みな技を,機械設計,人間らしい動き,強調操作などに応用します.例えば,茶運び人形における加工・組立誤差を調査しました.
人の手指の使役効果
小指を曲げると勝手に薬指も曲がる効果(使役効果)を解析し,マニピュレータを省自由度化しました.
